聯(lián)系方式 | 手機瀏覽 | 收藏該頁 | 網(wǎng)站首頁 歡迎光臨東莞市虎山電子有限公司

東莞市虎山電子有限公司 測試模組;手機及周邊|3C外部多接口;網(wǎng)通產(chǎn)品|服務(wù)器;測試線材;|圓形連接器
13377777032


2026-03-16 04:08:50
汽車電子測試轉(zhuǎn)接頭的成本控制需在性能與經(jīng)濟性之間找到平衡。標準化轉(zhuǎn)接頭通過規(guī)模化生產(chǎn)降低單位成本,而定制化產(chǎn)品則需優(yōu)化設(shè)計流程,采用模塊化理念減少專門的部件數(shù)量。壽命周期成本分析顯示,雖然高質(zhì)量轉(zhuǎn)接頭的初始采購成本較高,但通過減少故障停機時間、延長使用壽命,其綜合成本反而更低。在測試設(shè)備選型中,轉(zhuǎn)接頭的總成本應(yīng)納入考量,包括采購成本、維護成本、校準成本以及故障導(dǎo)致的隱性成本。與供應(yīng)商建立長期合作關(guān)系,通過批量采購與技術(shù)合作進一步降低成本,這對于控制汽車電子測試的整體成本具有積極意義。汽車電子測試轉(zhuǎn)接頭的插拔力需適中,便于操作又防止汽車電子接口意外脫落。珠海高壽命汽車電子柔性模組
汽車電子測試模組的通信接口兼容性直接決定其應(yīng)用范圍,高級產(chǎn)品通常集成 CAN FD、LIN、Ethernet 等多種車載總線接口。CAN FD 接口支持 8Mbps 高速傳輸,可驗證自動駕駛域控制器的實時通信性能;車載以太網(wǎng)接口符合 IEEE 802.3bw 標準,滿足 100BASE-T1 的測試需求;LIN 接口則用于車身控制模塊等低速網(wǎng)絡(luò)的驗證。接口轉(zhuǎn)換模塊實現(xiàn)不同總線協(xié)議間的透明轉(zhuǎn)發(fā),支持跨網(wǎng)絡(luò)測試場景,如驗證 CAN 與 Ethernet 之間的網(wǎng)關(guān)轉(zhuǎn)發(fā)性能。這種多接口設(shè)計使模組能覆蓋從傳統(tǒng)汽車到智能網(wǎng)聯(lián)汽車的全譜系電子系統(tǒng)測試。模塊化汽車電子兼容性測試虎連,助力汽車電子測試邁向更高效、更可靠的未來。
汽車電子測試模組的合規(guī)性測試模塊內(nèi)置國際與行業(yè)標準的測試流程,如 ISO 11898(CAN 總線)、ISO 14230(KWP2000)、SAE J1939(商用車網(wǎng)絡(luò))等。測試序列嚴格遵循標準中的測試條件與判定準則,確保測試結(jié)果的威嚴性。針對地區(qū)性法規(guī),如中國的 GB/T 19951、歐盟的 ECE R10 等,汽車電子測試模組提供專門的測試模板,幫助企業(yè)滿足不同市場的準入要求。合規(guī)性測試報告則自動生成符合標準要求的格式,減少人工整理的工作量,加快產(chǎn)品的認證進程。
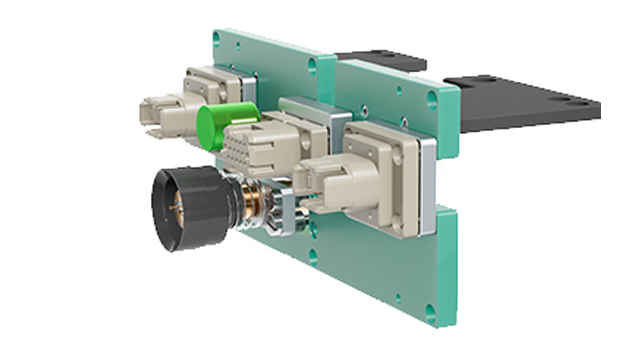
汽車電子測試模組的車規(guī)級接口設(shè)計確保與被測件的可靠連接,采用原廠規(guī)格的連接器(如 AMP、TE 等品牌),接觸電阻小于 10mΩ。接口模塊具備防誤插設(shè)計,機械編碼確保不同類型接口不會錯配,避免損壞 ECU。彈性接觸結(jié)構(gòu)補償插拔誤差,單個接口的插拔壽命達 10,000 次以上。針對生產(chǎn)線測試場景,汽車電子測試模組的接口模塊支持快速更換設(shè)計,更換時間小于 5 分鐘,減少設(shè)備停機時間。接口的密封性達 IP6K9K 等級,適應(yīng)生產(chǎn)車間的油污、水汽環(huán)境。磁性汽車電子測試轉(zhuǎn)接頭,實現(xiàn)快速定位連接,提升汽車電子測試效率。
高精度汽車電子測試轉(zhuǎn)接頭是實現(xiàn)車載電子系統(tǒng)參數(shù)精確測量的基礎(chǔ)。其阻抗匹配設(shè)計需與被測汽車電子部件的特性阻抗(通常為 50Ω 或 75Ω)保持一致,在 1MHz 至 1GHz 的頻率范圍內(nèi),反射損耗需優(yōu)于 - 20dB,避免信號反射導(dǎo)致的測量誤差。對于自動駕駛系統(tǒng)的毫米波雷達測試,專門的轉(zhuǎn)接頭需支持 77GHz 的高頻信號傳輸,插入損耗控制在 0.5dB 以內(nèi),確保雷達信號的相位與幅度測量精度。在激光雷達(LiDAR)測試中,轉(zhuǎn)接頭的時延誤差需小于 1ns,以滿足距離測量的高精度要求,為汽車電子傳感器的性能驗證提供準確的連接通道。高頻汽車電子測試轉(zhuǎn)接頭,支持汽車電子毫米波雷達等高速信號的測試需求。珠海高壽命汽車電子柔性模組
耐用型汽車電子測試轉(zhuǎn)接頭,可承受萬次插拔,降低汽車電子測試的耗材成本。珠海高壽命汽車電子柔性模組
智能駕駛汽車電子測試模組需具備多傳感器仿真能力,其視覺仿真模塊可輸出 LVDS 格式的虛擬攝像頭信號,幀率達 60fps,分辨率支持 1920×1080;雷達仿真模塊能生成點云數(shù)據(jù),模擬不同距離、速度的目標物;激光雷達仿真則可提供百萬點級的 3D 點云,模擬雨、霧等天氣對傳感器的影響。傳感器數(shù)據(jù)同步精度控制在 1ms 以內(nèi),確保多傳感器融合算法的測試有效性。通過與場景引擎(如 Prescan)對接,模組可復(fù)現(xiàn)海量真實交通場景,從各方面驗證自動駕駛系統(tǒng)的感知與決策能力。珠海高壽命汽車電子柔性模組





